MCRS - Maximum Coverage Robotic Survey
The Maximum Coverage Robotic Survey (MCRS) software package is an advanced autonomous survey system designed to deliver complete, repeatable, and verifiable coverage of complex environments.
Developed for use in nuclear decommissioning and other hazardous industries, MCRS enables robotic systems to automatically generate and execute deterministic survey paths based on user-defined resolution and sensor geometry.
The software optimises route planning to maximise coverage, manage error recovery, and ensure consistent data acquisition across repeated missions.
By removing the need for manual waypoint generation and operator-intensive oversight, MCRS significantly reduces survey time and operator cognitive load, while improving accuracy and reliability.
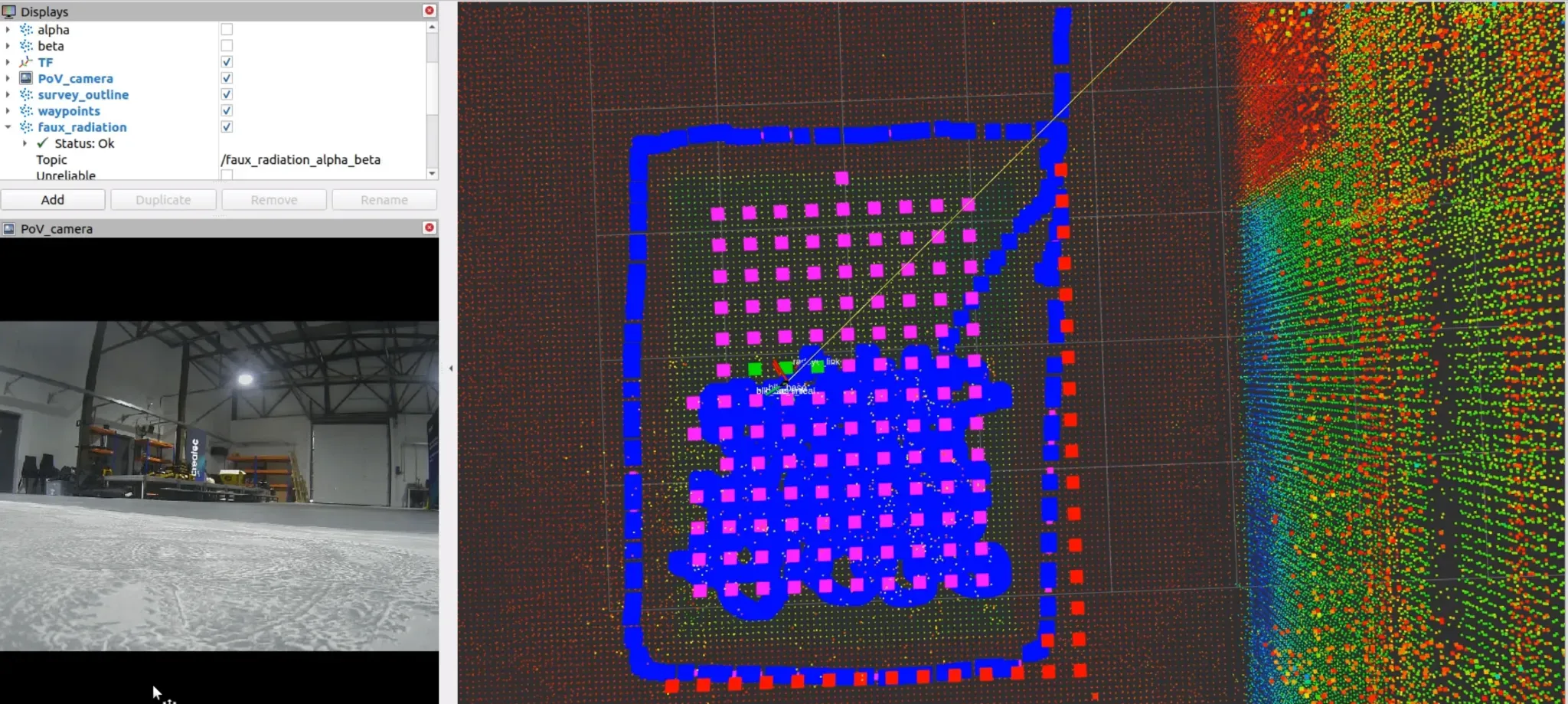
Designed to integrate with a wide range of ground and marine robotic platforms, the package includes modules for mission planning, live data visualisation, and performance validation, providing a complete solution for autonomous environmental mapping, inspection, and radiometric data collection in safety-critical settings.
Specifications:
Software
- Dockerised container containing MCRS package
- Can be installed and interfaced with using easy to use Portainer UI
Usage
- Operator drives robot around perimeter of servayable area, and perimeter of any obstacles
- MCRS autonomy triggered, robot will survey environment autonomously
Miscellaneous
- Compatible with OSE GeoMapper and Leica BLKARC geospatial scanners
- Designed around OSE UGV (Unmanned Ground Vehicle), and OSE USV (Unmanned Surface Vessel) but compatible with any ground robot platform
- Survey resolution can be adjusted based on user preference
- Surveys are repeatable, enabling condition monitoring
- Robust and error tolerant software